
BIO-LUCA AMPHIBIOUS ROBOT:
Robot survival during operations is one of the most critical challenges in robotic design for environments that are a combination of land and water. Moreover, they have various roughness and sometimes uneven and spatially surfaces that complicate the situation for robot activities. Aqueducts, pipelines, and sewers are examples of these environments. Thus most of the experiments that have been performed so far have not been completed, either due to the inability of the robot to interact with a variety of environmental obstacles or overturning and impotence to turn back to the normal situation.

BIO_LUCA
AMPHIBIOUS ROBOT
MRI Compatible Robot (MCROBOT)
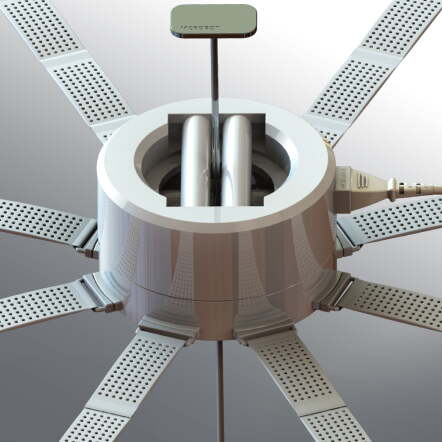
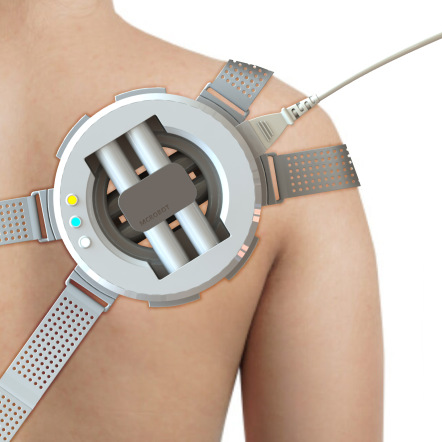
MRI Compatible Robot (MCROBOT):
It was an interdisciplinary project led by the Biomechanics team at the faculty of Medical Engineering.
MCROBOT (MRI compatible Robot) is a surgeon robot via remote control by surgeon physician during MRI imaging, being efficient in biopsy, recognition, and treatment. All these are done through inserting a needle, catheter, probe, etc., into a limited incision on the skin or anatomical opening, while indirect observation of the surgical field (in MRI machine).
Lower_Extremities Occupational Exoskeleton
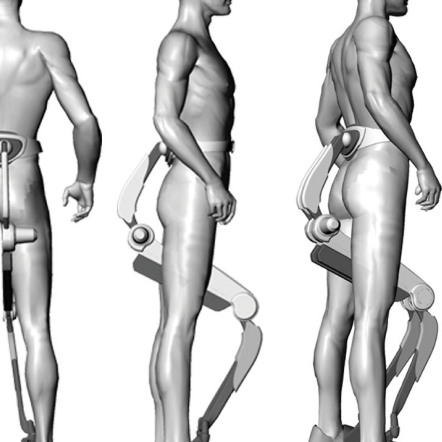
Lower Extremities' Occupational Exoskeleton:
This project aimed to control the side effects of three risk factors of Work-related Musculoskeletal Disorders (WMSDs): repetition, awkward postures, and force exertion in a blue-collar worker's lower extremities. It was inspired by the HONDA’s existed walking assist devices.
MRI Modular Bed (MMBED)
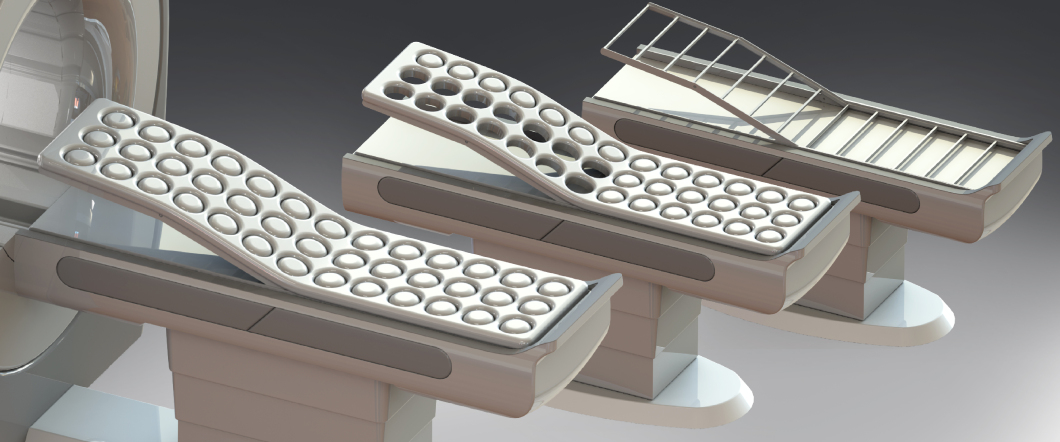
MRI Modular Bed (MMBED):
While investigating MRI, I diagnosed awkward patient postures during the various processes of disease recognition, such as mammography or prostate biopsy, in which some related devices need to be fastened to or carried by patients (mostly MRI Coils). Thus, I aimed to design a user-centred MRI bed, which creates a better experience during MRI scans.

Bio_Luca Sewer Robot
MCROBOT (MRI Compatible Robot)
Lower_Extremities Exoskeleton
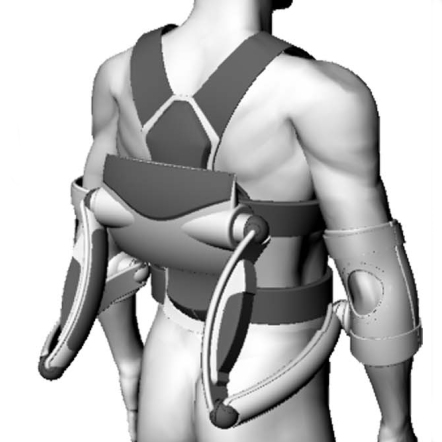
Upper_Extemities Exoskeleton

Ice_Cream Cafe

Pedestrian Smart Selling System

Lamis Store Display

Frozen Food Container

Pedestrian Smart Selling System

Packaging & Branding Natural Cheese

Stair Chair Handle

Payment Kiosk

Packaging & Branding Natural Cheese


Stand Self-Service Kiosk
MRI Compatible Robot

Golrang Women's Shower Gel

3DELUXE OXIDANT

Honey Store Display

Check-in Kiosk

Branding & Packaging Cooking Bags

Softlan Store Display

Golrang Family Handwashing

Upper_Limbs Exoskeleton

Temporary Dishpenser Hand-Washing

Dishwashing Bottle
Ice_cream Cafe Kalleh

Handwashing Bottle Design
MRI Compatible Robot (MCROBOT)

Handwashing Bottle Design

Temporary Dispenser Hand-Washing

Honey Packaging & Branding
BIO_LUCA Sewer Robot

Backpack for Carrying Sensitive Items

Handwashing Bottle Design
Branding & Packaging Cellulose Products
Mayonnaise Container

Branding & Packaging Keep_Fresh Bags

Branding & Packaging Household Gloves

Honey Store Display

BIO_LUCA Sewer Robot
MRI BED

Honey Store Display

Men's Hair & Body Shampoo

Smart Pedestrian Selling System
Ice_Cream Cafe Kalleh

Backpack Design

3DELUXE Oxidant